自动驾驶高精地图生成技术大揭秘
在自动驾驶技术飞速发展的今天,高精地图作为车辆的“超级眼睛”和“记忆大脑”,已成为实现安全、高效自动驾驶不可或缺的核心基础设施。它远超传统导航地图的精度与信息维度,为自动驾驶系统提供了厘米级的道路模型、丰富的语义信息以及实时的动态更新能力。本文将深入揭秘计算机信息科技领域内,支撑高精地图生成的关键技术。
一、高精地图:自动驾驶的基石
高精地图的核心特征在于“高精度”与“高丰富度”。其绝对坐标精度可达厘米级,不仅包含车道线、交通标志、路缘石等静态道路元素的精确几何与属性信息,还集成了坡度、曲率、限高等对车辆控制至关重要的参数。它预先“记忆”了道路的精确样貌,帮助自动驾驶车辆进行精准定位、路径规划与行为决策,尤其是在传感器受天气、光照或障碍物影响时,提供稳定的先验知识支持。
二、核心技术栈:从数据采集到动态更新
高精地图的生成是一个复杂的系统工程,融合了多种前沿计算机信息技术。
1. 多传感器融合采集技术
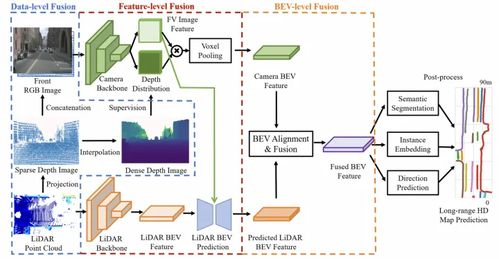
这是数据获取的源头。专业采集车通常配备激光雷达、摄像头、高精度GNSS/IMU组合导航系统。激光雷达提供精确的三维点云数据,构建环境的骨骼框架;摄像头捕捉丰富的纹理和颜色信息,用于识别交通标志、车道线类型等语义内容;GNSS/IMU则提供连续、高精度的位置与姿态信息,是所有数据时空对齐的基准。多源数据的同步与融合是确保原始数据质量的关键。
2. 点云处理与SLAM技术
海量的激光点云数据需要经过滤波、分割、分类等处理,以提取出道路、建筑物、杆状物等要素。在GNSS信号缺失的区域(如隧道、城市峡谷),同步定位与地图构建技术至关重要。SLAM算法能利用传感器数据实时推断采集车自身的位姿并同步构建局部地图,确保地图的连续性和精度。
3. 计算机视觉与深度学习
这是赋予地图“理解”能力的技术。基于深度学习的图像识别算法被广泛应用于从摄像头图像中自动检测和分类车道线、交通标志、信号灯、路牌文字等元素。语义分割网络能将点云或图像中的每个像素/点归类到不同的语义类别,从而实现道路场景的自动化、精细化解析。
4. 众源更新与云平台技术
高精地图的生命力在于“鲜度”。传统专业采集更新成本高、周期长。如今,通过云平台,可利用量产自动驾驶车辆或智能网联汽车作为“移动传感器”,持续回传感知到的局部变化(如施工、临时路障)。云平台利用众包数据融合、变化检测算法,实现地图要素的增量更新与快速发布,形成“采集-发布-使用-反馈”的闭环。
三、技术挑战与未来展望
尽管技术日趋成熟,高精地图的生成仍面临挑战:如何进一步提升自动化程度以降低制图成本;如何处理海量众包数据的一致性与可信度;如何实现不同图商地图数据的标准化与互通。
高精地图技术将与车路协同、边缘计算更深度结合。地图本身可能进化为一个动态的、支持实时交互的“高精语义时空数据库”,不仅描述静态世界,更能融合来自路侧单元、其他车辆的动态事件信息,为自动驾驶提供超越视距的感知能力,最终成为智慧交通系统的核心数字底座。
高精地图生成技术是计算机视觉、人工智能、测绘科学、云计算等多学科交叉的璀璨结晶。它的持续进化,正悄然推动着自动驾驶乃至整个交通产业向着更安全、更智能的未来稳步前行。
如若转载,请注明出处:http://www.ekejtezgpwl.com/product/34.html
更新时间:2026-03-01 03:26:12